|
|
|
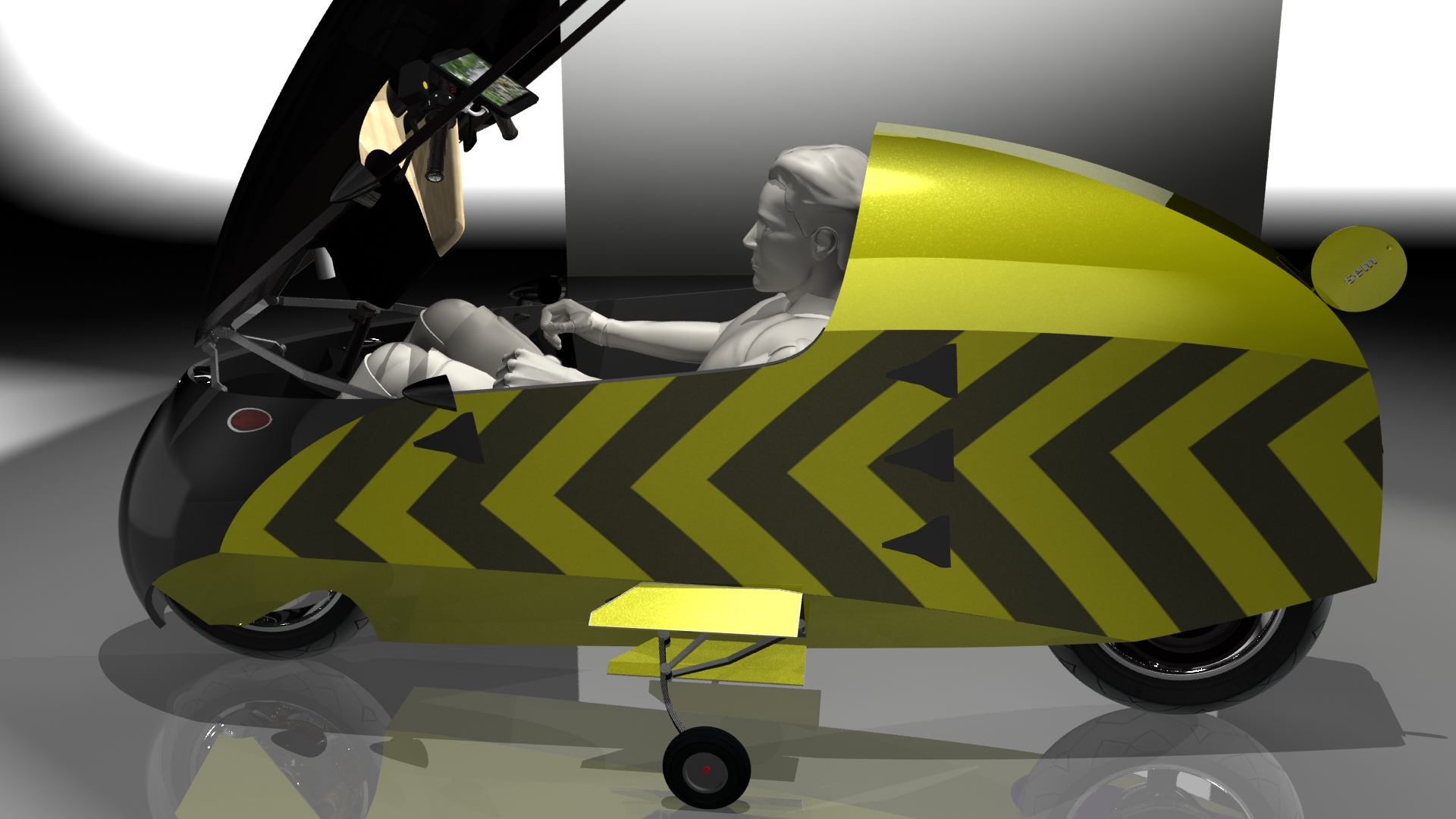
Have a look at the movie page also. The sleek body of the SEM has, a landing gear, a suicide door, a very sturdy frame, the large 30Kw agni motor, a substantial 10KwH battery pack, single sided suspension front and back, hub center steering, steering by push-pull cables, push pull cables to control the landing gear, tablets for control of the sem as well as getting outside information, camera's are used for rearview imaging, industrial grade bearings, belt drive, battery managment system, throttle power control, regenerative braking, ... |

 |


|
|
|
|
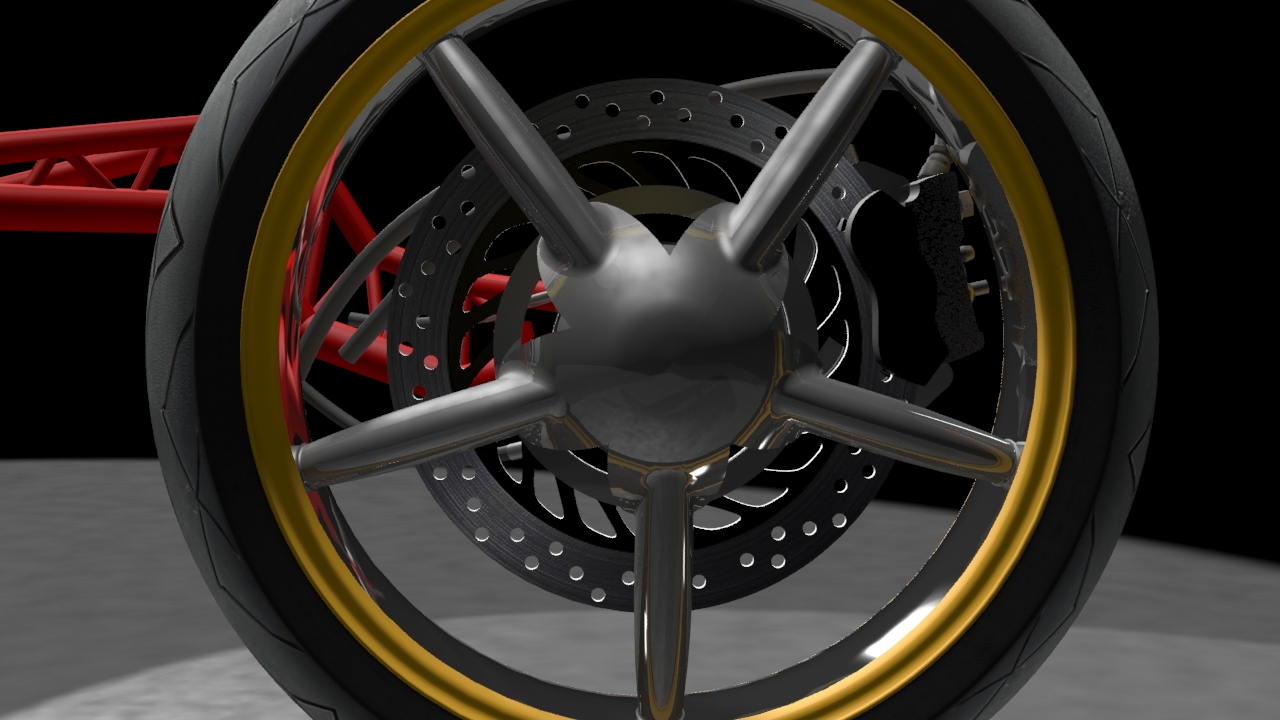
To decrease the height required for the steering a center hub steering was designed. In het movie you can see that a double sided version was designed as well as a single sided one. For ease of tyre changes the single sided one is prefered. Once you understand hub center steering, you can see it is not as complicated as one might think, but the combination of the two axes of rotation in a very small volume is where the challenge lies. The advantage of the single sided version is also the possibility to use a much smaller and consequently lighter main wheel bearing compared to the double sided version. In the double sided hub center steering the inner diameter of the main wheel bearing is as large as the center hub steering. |

 |


|
|
|
|
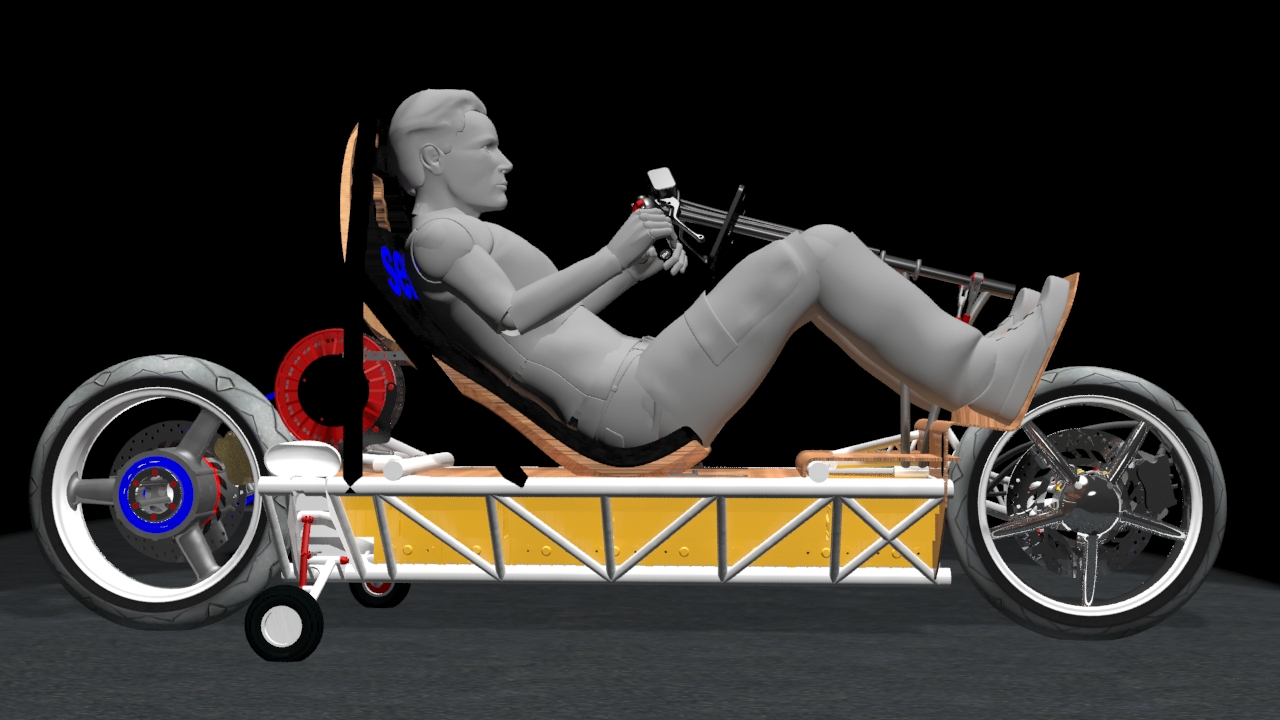
The triangulated tubular frame is designed to withstand the substantial force of the driver, de substantial 10Kwh battery pack, the significant power of the 30Kw agni motor and the single sided support of both front and rear wheel. During the design we chose to make a single battery compartment as low as possible in the sem. We have tried to keep de centre of gravity as low as possible for obvious reasons. The two main masses of the sem are the driver and the battery pack. They are now one on totp of the other which is not ideal put putting the driver in front of aft of the battery pack would have increased the length of the sem unacceptably. |
|
|
|
We have opted for still using a landing gear instead of gyro balancing the vehicle (like LIT or Thunder cycle). The gyro system requires extensive experimentations as can be seen from the youtube movies of the companies trying that route. We are very interested in this option so future designs might be using that system. Why then have we chosen to operate the landing gear manually? As with motorcycling we all have our own timing of putting our stabilizer out. Why make a complicated electric system (what speeds to go up or down) when a simple mechanical system can be used. |

 |
|
|
| Control and monitoring of the electrical system is through tablet computer. We use a second tablet for presentation of routplanning and gps position in combination with rearview HD camera images. This use of video for rearview imaging is a problem in many countries but we expect regulation to change as using these camera's will become mainstream. |

|